Саяхан JSR-ийн үйлчлүүлэгч найз робот гагнуурын даралтын савны төслийг өөрчилсөн. Захиалагчийн ажлын хэсгүүд нь янз бүрийн үзүүлэлттэй байдаг бөгөөд гагнуур хийх олон эд анги байдаг. Автомат нэгдсэн шийдлийг зохион бүтээхдээ хэрэглэгч дараалсан гагнуур эсвэл спот гагнуур хийж, дараа нь роботыг бүрэн ашиглаж байгаа эсэхийг баталгаажуулах шаардлагатай. Хийх ёстой. Энэ хугацаанд би түүнийг албан тушаалтныг сонгоход эргэлзэж байгааг олж мэдсэн тул JSR үүнийг хүн бүрт товч танилцуулав.
Хос станцтай Нэг тэнхлэгт толгой ба тэнхлэгийн босоо эргүүлэх байрлал
VS Гурван тэнхлэгт босоо эргүүлэх байрлал
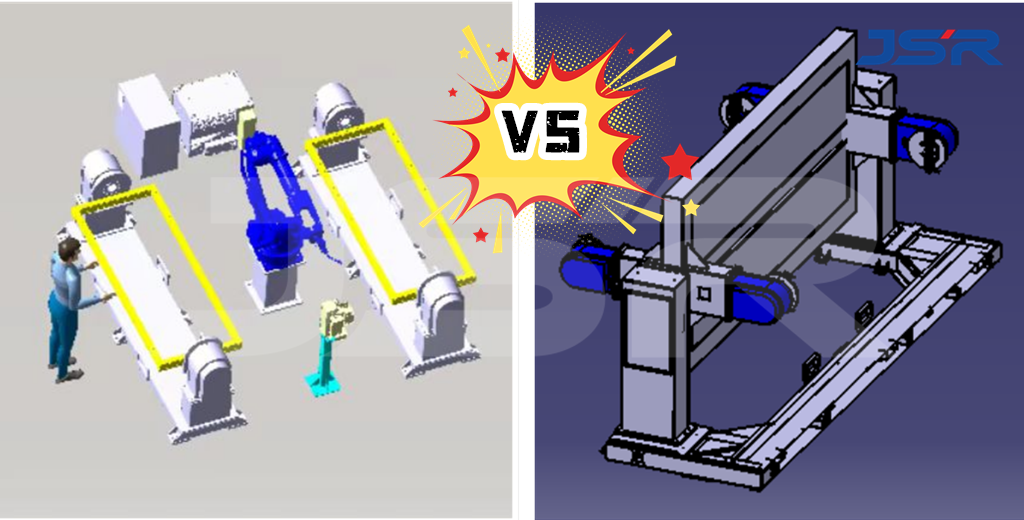
Роботын гагнуурын ажлын байранд хос станцтай Нэг тэнхлэгт толгой ба тэнхлэгийн босоо эргүүлэх байрлал тогтоогч, гурван тэнхлэгт босоо эргүүлэх байрлал тогтоогч нь хоёр нийтлэг байрлал тогтоох төхөөрөмж бөгөөд тэдгээр нь өөр өөр хэрэглээний хувилбаруудад өөрийн гэсэн давуу талтай байдаг.
Дараах нь тэдгээрийн хэрэглээний хувилбарууд болон харьцуулалтууд юм.
Хос станцын нэг тэнхлэгт толгой ба сүүлний хүрээний байрлал тогтоогч:
Энэ нь гагнуурын явцад ажлын хэсгийг эргүүлж, байрлуулах шаардлагатай хувилбаруудад тохиромжтой. Тухайлбал, автомашины их биений гагнуурын үйлдвэрлэлийн шугамд хоёр ажлын хэсгийг хоёр станцад зэрэг суурилуулж, нэг тэнхлэгт толгой ба сүүлний байрлал тогтоогчоор дамжуулан ажлын хэсгүүдийн эргэлт, байрлалыг хийж, үйлдвэрлэлийн үр ашгийг дээшлүүлдэг.
https://youtube.com/shorts/JPn-iKsRvj0
Гурван тэнхлэгт босоо эргүүлэх байрлал тогтоогч:
Ажлын хэсгүүдийг олон чиглэлд эргүүлэх, эргүүлэх шаардлагатай нарийн төвөгтэй гагнуурын хувилбаруудад тохиромжтой. Жишээлбэл, сансрын салбарт нисэх онгоцны их биеийг нарийн гагнуур хийх шаардлагатай байдаг. Гурван тэнхлэгт босоо эргүүлэх байрлал тогтоогч нь янз бүрийн өнцгөөр гагнуурын хэрэгцээг хангахын тулд ажлын хэсгийг хэвтээ ба босоо чиглэлд олон тэнхлэгт эргүүлэх, эргүүлэх боломжтой.
https://youtu.be/v065VoPALf8
Давуу талуудын харьцуулалт:
Хос станцын нэг тэнхлэгт толгой ба сүүлний хүрээний байрлал тогтоогч:
- Энгийн бүтэцтэй, ажиллуулах, засвар үйлчилгээ хийхэд хялбар.
- Үйлдвэрлэлийн үр ашгийг дээшлүүлэхийн тулд хоёр ажлын хэсгийг нэгэн зэрэг боловсруулж болно.
- Нэг тэнхлэгийн эргэлтийг шаарддаг ажлын хэсгүүд гэх мэт энгийн гагнуурын ажилд тохиромжтой.
- Үнийн хувьд гурван тэнхлэгтэй босоо эргүүлэгчээс хямд байна.
- Гагнуур нь зүүн ба баруун станцуудын хооронд шилждэг. Нэг станц дээр гагнуур хийхдээ ажилчид нөгөө талдаа материалаа ачих, буулгах шаардлагатай болдог.
Гурван тэнхлэгт босоо эргүүлэх байрлал тогтоогч:
- Энэ нь олон тэнхлэгт эргүүлэх, эргүүлэх чадвартай бөгөөд гагнуурын нарийн төвөгтэй ажилд тохиромжтой.
- Робот гагнуурын үед ажилчид зөвхөн нэг талдаа бэлдэцийг ачих, буулгах ажлыг дуусгах хэрэгтэй.
- Янз бүрийн гагнуурын өнцгийн шаардлагыг хангаж чадах байрлалын илүү уян хатан байдал, нарийвчлалыг өгдөг.
- Гагнуурын өндөр чанар, нарийвчлал шаардсан ажлын хэсгүүдэд тохиромжтой.
Дүгнэж хэлэхэд тохиромжтой байрлал тогтоогчийг сонгох нь ажлын хэсгийн нарийн төвөгтэй байдал, гагнуурын өнцөг, үйлдвэрлэлийн үр ашиг, гагнуурын чанарт тавигдах шаардлага зэрэг гагнуурын ажлын тодорхой шаардлагаас хамаарна.
Шуудангийн цаг: 2024 оны 2-р сарын 20-ны хооронд
